儌乕僞偵庢傝晅偗傜傟偨墌斦偼僄儞僐乕僟僨傿僗僋偲屇偽傟傞晹昳偱偡丅僄儞僐乕僟僨傿僗僋偼僐偺帤宍偺晹昳偺娫傪夞傞傛偆偵偮偔傜傟偰偄傑偡偑丄偙偺僐偺帤宆偺晹昳偼僼僅僩僀儞僞儔僾僞偲偄偆傕偺偡丅僄儞僐乕僟僨傿僗僋偲僼僅僩僀儞僞儔僾僞傪偁傢偣偰儘乕僞儕僄儞僐乕僟傪峔惉偟偰偄傑偡丅
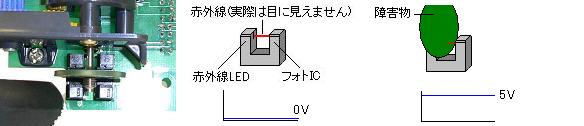
僼僅僩僀儞僞儔僾僞偼忋恾偺傛偆偵僗儕僢僩傪偼偝傫偱愒奜慄LED偲僼僅僩IC偑岦偐偄崌傢偣偱攝抲偝傟偰偄傑偡丅僼僅僩IC偼愒奜慄偑徠幩偝傟傞偲0V丄徠幩偝傟側偄偲5V(揹尮揹埑)偺弌椡傪弌偡傛偆偵側偭偰偄傑偡偺偱僗儕僢僩偺偁偄偩偺忈奞暔偺桳柍傪専弌偡傞偙偲偑偱偒傑偡丅僄儞僐乕僟僨傿僗僋偺寠偼LED偺岝傪捠偟丄寠偺嬻偄偰偄側偄偲偙傠偼岝傪捠偟傑偣傫偺偱寠偑捠夁偟偨夞悢傪悢偊傟偽儌乕僞偑偳偺偔傜偄夞偭偨偐丄幵椫偑偳偺偔傜偄夞偭偨偐傪抦傞偙偲偑偱偒傑偡丅
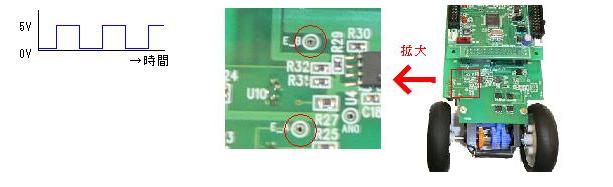
儘乕僞儕僄儞僐乕僟偺巇慻傒偼忋婰偺偲偍傝偱偡偑丄PUPPY偵偼僼僅僩僀儞僞儔僾僞偑2偮偮偄偰偄傑偡丅2偮昁梫側傢偗偼幵椫偺夞揮妏搙偩偗偱偼側偔丄夞揮曽岦傕専弌偡傞昁梫偑偁傞偐傜偱偡丅丂
僼僅僩僀儞僞儔僾僞偑1偮偩偗偮偄偰偄傞応崌偵偮偄偰峫偊偰傒傑偡丅PUPPY偺幵椫傪堦掕偺懍偝偱夞揮偝偣偨偲偒僼僅僩僀儞僞儔僾僞偺弌椡攇宍偼恾A偺傛偆偵側傝傑偡丅僆僔儘僗僐乕僾傪偍帩偪偺曽偼幨恀1偺E_A傕偟偔偼E_B偵僾儘乕僽傪摉偰傞偲摨條偺攇宍傪尒傞偙偲偑偱偒傑偡丅
丂丂丂丂丂丂丂丂丂恾A丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂幨恀1
恾A偱5V偐傜0V偵曄壔偡傞(棫壓傝)夞悢傕偟偔偼0V偐傜5V偵曄壔偡傞(棫忋偑傝)夞悢偑寠偑捠夁偟偨夞悢偲摍偟偔側傞偺偱丄恾A偺攇宍偩偗偱傕幵椫偺夞揮妏傪抦傞偙偲偼偱偒傑偡丅崱搙偼幵椫傪媡偺岦偒偵夞偟偰傒偰偔偩偝偄丅媡偺岦偒偵夞偟偰傕恾A偺攇宍偑弌偰偒傑偡丅夞揮曽岦傪曄偊偰傕攇宍偑摨偠偱偼幵椫偑偳偪傜偵夞偭偨偺偐専抦偡傞偙偲偼偱偒傑偣傫丅偦偙偱丄弌椡攇宍偑90亱偢傟傞傛偆側埵抲娭學偵僼僅僩僀儞僞儔僾僞傪傕偆傂偲偮攝抲偟傑偡丅幵椫偺夞揮曽岦傪幨恀2偺傛偆偵掕媊偡傞偲丄幵椫傪惓揮偝偣偨偲偒僼僅僩僀儞僞儔僾僞偺弌椡(E_A,E_B)偼恾B偺傛偆偵側傝傑偡丅
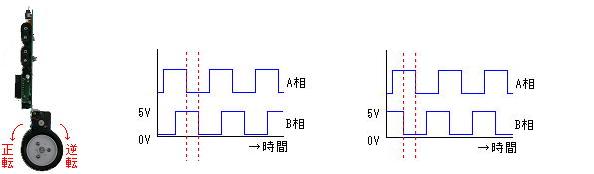
丂丂幨恀2丂丂丂丂丂丂丂丂丂丂恾B丂幵椫惓揮帪偺攇宍丂丂丂丂丂丂丂丂恾C丂幵椫媡揮帪偺攇宍
恾B傪尒傞偲E_A偺怣崋傪A憡弌椡丄E_B傪B憡弌椡偲偡傞偲丄幵椫傪惓揮偝偣偨偲偒A憡偵懳偟偰B憡偼90亱埵憡偑恑傫偱偄傑偡丅幵椫傪媡揮偝偣傞偲恾C偺傛偆偵側傝丄崱搙偼A憡偵懳偟偰B憡偼90亱埵憡偑抶傟偰偄傑偡丅A憡偲B憡偺埵憡嵎傪尒傟偽惓揮t揮傪専抦偡傞偙偲偑偱偒傑偡丅
![]()