
PUPPY偼僊儎儃僢僋僗偵晅懏偺RE-260儌乕僞(儅僽僠)偱搢棫惂屼傪峴偭偰偄傑偡丅搢棫惂屼傪幚尰偡傞偨傔偵儌乕僞偼惓夞揮丄媡夞揮偑弌棃側偗傟偽側傝傑偣傫偟丄夞揮偡傞懍搙傕帺桼偵曄偊傜傟側偗傟偽側傝傑偣傫丅PUPPY偱偼丄H僽儕僢僕偲屇偽傟傞儌乕僞僪儔僀僽夞楬傪嵦梡偟偙傟傜傪幚尰偟偰偄傑偡丅
恾1
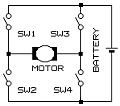
恾2偵H僽儕僢僕偺柾幃恾傪帵偟傑偡丅儌乕僞傪偼偝傫偱僗僀僢僠偑4偮愙懕偝傟偰偄傑偡丅偙偺宍偑'H'偺宍偵帡偰偄傞偙偲偐傜H僽儕僢僕偲屇偽傟傞偦偆偱偡丅
恾2
恾2偺僗僀僢僠傪憖嶌偟偨偲偒偦傟偧傟偺応崌偵偮偄偰尒偰傒傑偟傚偆丅
SW1偲SW2傪暵偠偨偲偒
揹抮偺+嬌偲-嬌偑捈寢偡傞偙偲偵側傝傑偡丅僔儑乕僩偲傕偄偄傑偡丅揹抮偑塼楻傟偟偨傝丄堎忢偵壛擬偟偨傝偟偰婋尟偱偡丅丂SW3偲SW4傪暵偠偨偲偒傕摨條偱偡丅
SW3偲SW2傪暵偠偨偲偒
揹抮偺+嬌偐傜SW3丄儌乕僞丄SW2丄亅嬌偲偄偆宱楬偱揹棳偑棳傟傑偡丅儌乕僞偵揹棳偑棳傟傞偺偱儌乕僞偼偁傞曽岦偵夞揮偟傑偡丅
SW1偲SW4傪暵偠偨偲偒
揹抮偺亄嬌偐傜SW1丄儌乕僞丄SW4丄亅嬌偲偄偆宱楬偱揹棳偑棳傟傑偡丅SW3偲SW2傪暵偠偨偲偒偲偼儌乕僞偵棳傟傞揹棳偺曽岦偑堘偄傑偡偺偱媡偵夞傝傑偡丅
埲忋偐傜H僽儕僢僕偱偼僗僀僢僠傪暵偠偨傝丄奐偄偨傝偟偰惓夞揮丄媡夞揮偑帺桼帺嵼偵惂屼偱偒傑偡丅師偵儌乕僞偺夞揮悢傪曄偊傞応崌偵偼偳偆偡傟偽傛偄偱偟傚偆偐丅椺偊偽SW3偼暵偠偭傁側偟偵偟偰偍偄偰SW2偺傎偆傪暵偠偨傝奐偄偨傝傪孞傝曉偡偲儌乕僞偼夞偭偨傝夞傜側偐偭偨傝偟傑偡丅偙偺SW3偺憖嶌傪旕忢偵憗偔峴偊偽儌乕僞偼楢懕偟偰夞傝傑偡丅僗僀僢僠傪暵偠偰傞妱崌傪憹傗偣偽傛傝憗偔夞傝丄妱崌傪尭傜偣偽抶偔夞傝丄偳傫偳傫尭傜偟偰偄偔偲傗偑偰巭傑傝傑偡丅H僽儕僢僕偼僗僀僢僠偺憖嶌偱夞揮悢傕惂屼偱偒傑偡丅
幚嵺偺PUPPY偺夞楬偱偼僗僀僢僠偺戙傢傝偵MOSFET(恾3)偲偄偆慺巕傪巊偄傑偡丅MOSFET偺徻偟偄愢柧偵偮偄偰偼愱栧彂傪偛棗偵側偭偰偄偨偩偔偲偟偰丄偙偺MOSFET傪巊偆棙揰偼
丂戝揹棳偑棳偣傞
丂ON掞峈偑彫偝偄
丂崅懍偵僗僀僢僠儞僌偑偱偒傞
偲偄偆偙偲偱儌乕僞僪儔僀僽夞楬偵偼偆偭偰偮偗偺慺巕側偺偱偡丅

恾3丂MOSFET亊4
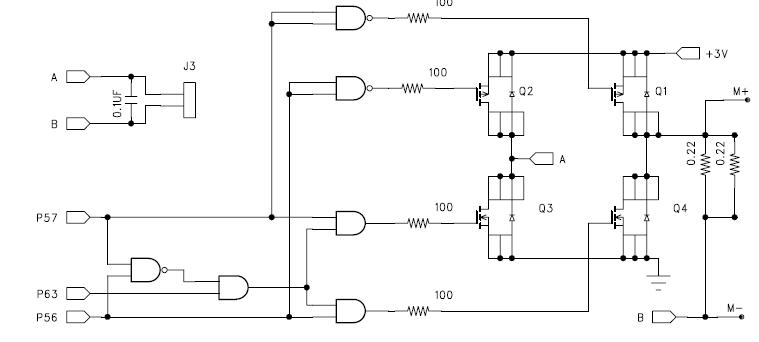
PUPPY偺儌乕僞僪儔僀僽夞楬傪尒偰傒傑偟傚偆丅(恾4)
恾4
恾4偺A,B偑偦傟偧傟儌乕僞偵愙懕偝傟傑偡丅Q1乣Q4偑MOSFET偱丄Q1,Q2偑P僠儍僱儖丄Q3,Q4偑N僠儍僱儖偱偡丅偙偺応崌Q1偲Q2偼僎乕僩(100兌偺掞峈偲愙懕偝傟偰偄傞抂巕)偵LO儗儀儖偺揹埑傪報壛偡傞偲摫捠丄Q3丄Q4偼HI儗儀儖偱摫捠偟傑偡丅FET偺僎乕僩偺慜偺儘僕僢僋夞楬偱Q2偲Q3偑摨帪偵ON偵側傞傛偆側偙偲偑婲偙傜側偄傛偆偵偟偰偄傑偡丅P63偵偼恾5偺傛偆側PWM攇宍傪報壛偟Q3偍傛傃Q4傪崅懍偱ON,OFF(僗僀僢僠儞僌)偟傑偡丅
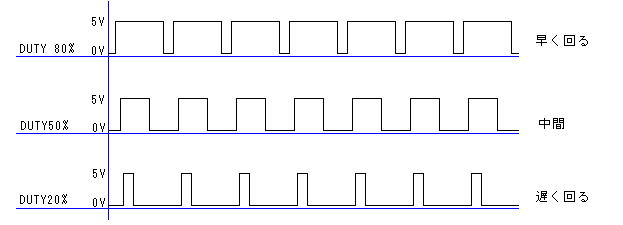
恾5 PWM攇宍
![]()